Stelarc
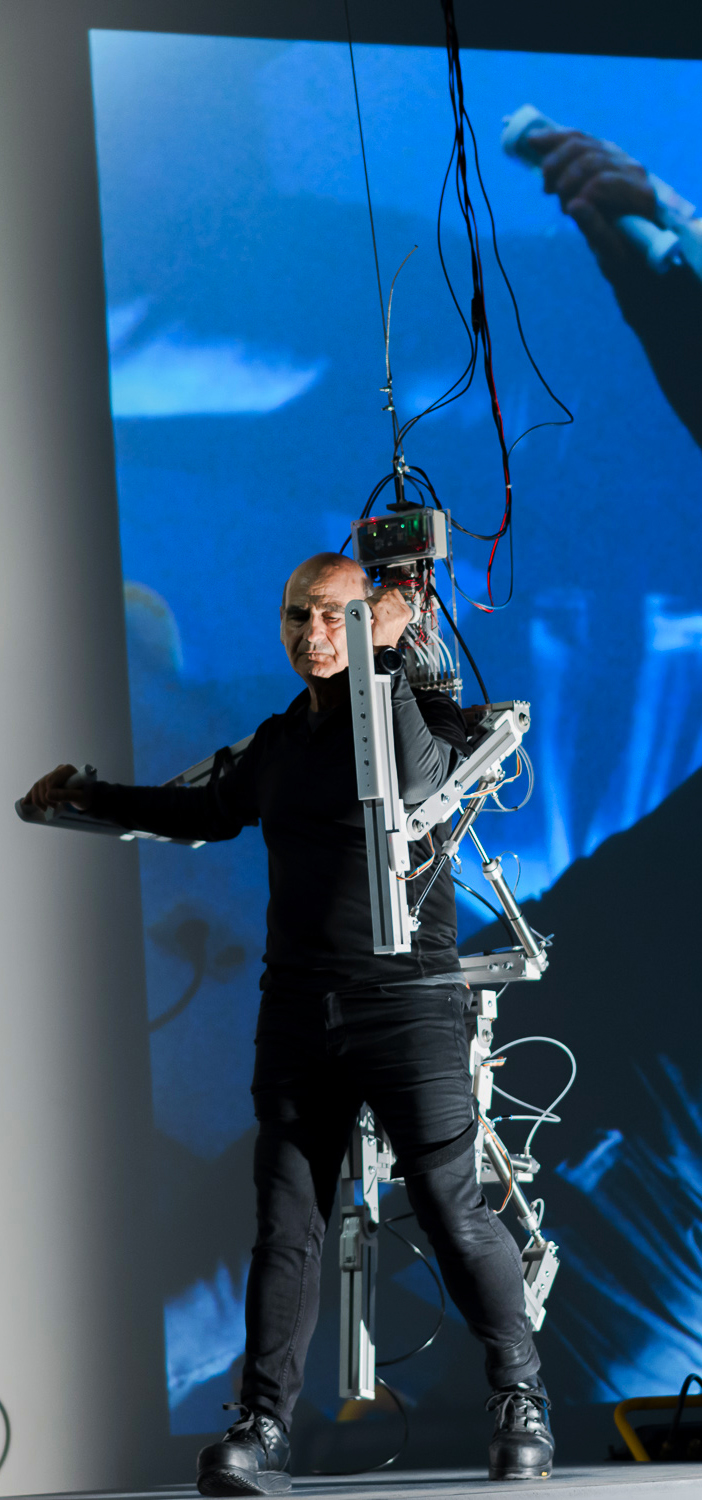
StickMan
StickMan is a minimal but full-body exoskeleton that algorithmically actuates the artist with 6 degrees-of-freedom. It is a gesture generating system capable of 64 possible combinations. Sensors on StickMan generate sounds that augment the pneumatic noise and register the limb movements. A ring of 6 speakers directs and circulates the sounds.

