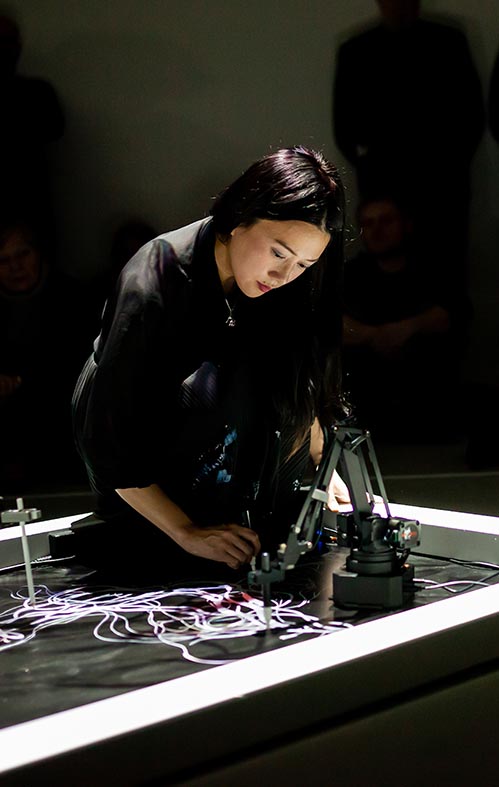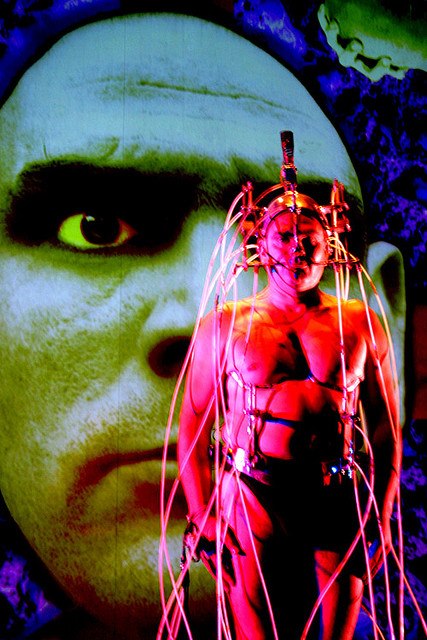
Marcel·lí Antúnez Roca
Afasia
File Festival – Hypersonica
Afasia is a surreal robotic performance that evolves Greek myths, and brings up the tragedy onto-machinal. Marcel.lí Antúnez Roca (Moià, 1959) is well-known in the international art scene for his mechatronic performances and robotic installations. In the 90′s his vanguardist mechatronic performances combined elements such as Bodybots (body-controlled robots), Systematurgy (interactive narration with computers) and Dresskeleton (the exoskeleton body interface). The themes explored in his work include: the use of biological materials in robotics, telematic control, the expansion of body movements with dresskeletons and microbiological transformations.